|
|
|
|
|
|
|
|

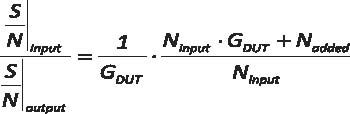
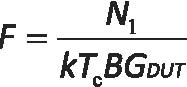
噪声系数定义:定义相当简单,如下图的方程所示,其中 F为噪声因子, Sinput和 Ninput是输入信号和噪声功率, Soutput和 Noutput是输出信号和噪声功率, Nadded是被测器件引入的噪声功率, GDUT是被测器件的增益,噪声系数是噪声因子的分贝表示 NF (dB) = 10 * log (F)。简洁的定义,测量似乎应该简单,但是,在定义的背后有相当多的假设条件,例如,被测件处于 50Ω测量环境,输入信号是连续波(未被调制),环境温度等。
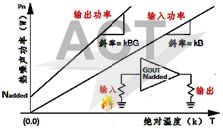
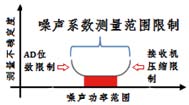
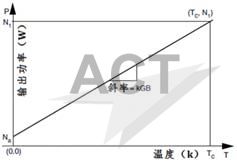
通常所说的噪声是由闪烁噪声、热噪声、弹射噪声及其它因素引起的噪声的综合效应,其中以热噪声为主。热噪声是由热电子散射造成的。所以,只要有温度就会有噪声,热产生的噪声功率为 Pn=kTB,这里 Pn是噪声功率, k是玻尔兹曼常数( 1.38×10-23焦耳 /开尔文),B是带宽, T是温度(开尔文)。例如,室温约 290K时,Pn=-174dBm/Hz。换言之,就是无论是什么器件,只要温度到达 290K (17℃),其自身就会有超过 -174dBm/Hz的噪声功率产生。一般无源器件产生的噪声功率也就是 -174dBm/Hz,一个衰减器的噪声系数就是其衰减量。有源器件自身产生噪声一般要大于热噪声,我们一般以等效噪声温度将这些等效于热噪声。 噪声系数测量:由图 1可以看出噪声系数测量的主要目标是被测件输出功率斜线与纵轴的交点, Nadded位置。对噪声系数测量的准确度分析也应该围绕对此位置的测量精度进行。 噪声系数测量不是那种可以说出精确到小数点后多少位的测量结果,如果在同样的条件下使用六种不同的设置和方法测量噪声系数,可能会有六个不同的测量结果,并且每一个结果都有很充分的技术依据。有些噪声系数测量仪表和方法已经在业界使用了若干年了,很多使用者认为这些仪表测量的结果就是标准结果。然而,此结果也仅是一个可以用于参考比较的数值罢了,从计量角度看此结果并不是可以追溯的标准。 当前使用较多的噪声系数测量方法为,增益法(也称冷源法)和 Y参数法(冷热源法),这两种方法都是使用接收机测量被测件输出的噪声功率。不同的是被测件的输入, Y参数法的输入有“冷”“热”两个状态。我们用图 2来表示测量框图,下面的讨论基本针对这两种测量方法进行。
图 1. 噪声系数测量一般在被测件的线性范围内。
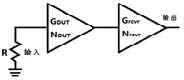
图 2. 测量框图。
测量连接与不确定性:由图 2可以知道噪声系数基本测量构成为级联结构,即被测件加上接收机。根据下面给出的级联方程被测件的噪声系数与整个级联结构的噪声系数( FDUT+rcvr),测量接收机的噪声系数( Frcvr)和被测件增益( GDUT)相关,如果使用 Y参数方法还要加上输入部分的“冷”“热”源的 ENR(Excess Noise Ratio)相关因数。
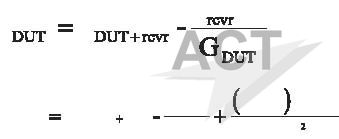
根据图 1和图 2,我们可以推断噪声系数的测量不确定性有以下几个无法回避的主要部份:①测量接收机本身的噪声系数,如果接收机本身的噪声系数过大,即接收机的测量灵敏度过低,测量不确定性会提高,尤其对于增益和噪声系数较低的被测件。②仪表本身的测量误差,仪表在校准和测量时对于不同的功率的测量不确定性,包括功率测量的幅度线性度。③各级之间的失配,对于有增益的被测件来说,输入端的失配造成的测量不确定影响更大。④输入功率的误差,环境温度的测量误差,以及在使用 Y参数方法时,输入的“冷”“热”状态的不确定性。 测量不确定性的估计运算:我们对各部分不确定性因数对测量不确定性的贡献可以有多种运算方式,例如, 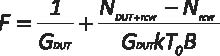 我们对增益法的测量不确定性可以由基本级联方程导入噪声功率的变形方程 1来表示。代入各项不确定因数后,我们可以得到不确定方程,如方程  其中,Δ R为测量功率校准和接收机的不确定度,包括校准与测量状态下的失配不一致和功率不一致造成的测量误差,Δ G为测量增益的不确定度,包括 S参数测量校准误差和被测件在不同的输入功率( S参数测量功率与噪声测量功率)下的线性度误差, ΔN为噪声功率测量的不确定度,包括失配造成的噪声功率测量误差,接收机功率测量线性度误差和抖动。由于有多个不确定因数,并且每因数之间也互相关联。
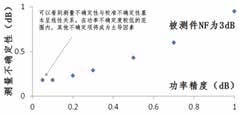
对被测件噪声系数不确定度的计算如果以各项不确定度的最大值来估算的话,显得太为严苛。一般采用某种统计方法加以估算,例如,可以采用“蒙特卡洛”法来估算被测件噪声系数的不确定度,即对于 Δ R、ΔGDUT、ΔNDUT+rcvr、ΔNrcvr在其各自容限内随机取值,统计足够多的 FDUT计算样本结果,得到误差分布,根据设定的概率容限(例如 90%)得到测量不确定范围。
当然我们也可以采用其他方法计算不确定范围,以 Y参数法测量的不确定性计算举例,首先找出各不确定项目与被测件不确定范围之间的关系,然后,采用选定的算法统计各个不确定因数对被测件不确定性的贡献。仍然由基本级联方程 3开始,导出各项与测量相关的不确定因数,即方程 4和方程 5。由 Y参数基本测量方程(方程 6)得到与测量相关的不确定度因数,如方程 7所示。其中 I和 M分别代表测量或校准时的仪表读数和失配情况,dI和 dM表示各自的不确定度。代入相应的因数,我们可以得到在校准状态下的 dFrcvr/Frcvr和在测量状态下的 dFDUT+rcvr/FDUT+rcvr值。 如果认为“蒙特卡洛”方法对被测件的噪声系数不确定度的计算过于宽松,也可以采用均方根方法对方程 5中的各因数进行统计运算,如方程 8所示,将不同状态下的方程 7导出的各因数代入,就可以得到被测件噪声系数测量的不确定度估计。
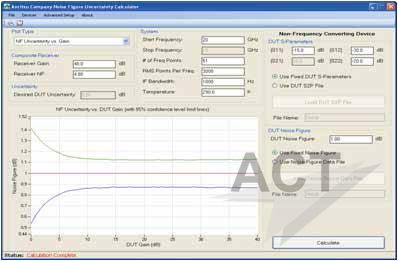
由方程 2和方程 8可以看出噪声系数测量的不确定度的估计与包括被测件本身特性的多个因数相关,并且各因数之间也相互关联,采用的运算方法也可以不同。因此,多数情况下对噪声系数测量的不确定性估计仅作为参考量。当然,多数噪声系数测量仪表供应商会提供相应的不确定度估计软件以方便使用者进行运算。例如, Anritsu美国公司的 MS4640B系列矢量网络分析仪就提供 Noise Figure Uncertainty Calculator用以对采用增益法(冷源法)测量噪声系数的不确定度的估计运算,如图 3。输入不同的设定我们可以计算:不同频率点的测量不确定度;不同被测件增益情况下的测量不确定度;对于设定的测量不确定度对于接收机增益的要求。
依照前面测量不确定性无法回避的部分,我们可以分析在实际测量应用中对于不同的被测件和仪表特性,确定对测量不确定度影响较大的因数,并就减小这些影响的设置和连接进行探讨。
图 3. 矢量网络分析仪噪声系数测量不确定度计算器界面。 接收机线性测量动态范围的影响:分析对测量接收机特性的要求还是根据级联方程,如果 GDUT较小,造成 Frcvr在运算中的权重较高,换言之,即测量时由被测件送入测量接收机的噪声信号功率电平,接近甚至淹没于接收机测量灵敏度电平之下,或者说接收机的 A/D转换位数已经用尽(拉平效应),结果是无法保证测量不确定度。在此情况下我们需要减小接收机本身的噪声系数,即提高接收机灵敏度,以减小 A/D转换位数的限制,可以在测量接收机输入端加入低噪声放大器,与接收机一起成为组合接收机。组合接收机的增益选择需要考虑被测件的增益,如果组合接收机的增益过大又会引发接收机的压缩效应也会严重影响噪声系数测量的不确定度。例如,使用 MS4640B矢量网络分析仪进行噪声系数测量时要求被测件的增益 +噪声系数 +低噪声放大器的增益为 40dB~70dB之间。前端低噪声放大器的噪声系数当然是越小越好,如果被测件的增益大于 10dB时,前端接收机的噪声系数对测量的不确定度影响就已经足够小了。由于接收机前端的宽带特质,对于同样宽带的噪声信号,无论是否是刻意所为,谐波分量(在更高的测量频率下更为明显)总是不可避免地进入,所以一般会将滤波器组合到接收机前端组合中。
前面可以看到噪声系数测量有一个基本假设,即测量是在被测件的增益线性范围内,同样,对于测量接收机而言,由于需要在不同的功率电平下测量功率电平,接收机的线性度指标将直接影响噪声系数测量的不确定度,此线性度指标包括在校准电平和不同测量设置下的不同接收电平下接收机的线性度,例如,采用增益法测量时需要校准接收机的绝对功率电平,如果采用与测量时输入功率相近的校准信号进行校准时,会有功率计的测量范围不足(或精度降低)的问题,即,校准和测量时的功率电平可能不处于一个相近的水平,需要更加线性的接收机指标。 Y参数法对接收机在不同功率下测量的线性度的要求更是直接表现在“冷”“热”噪声激励下的输出功率测量上。
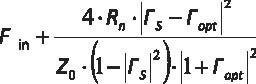
失配的影响:其次,对于噪声信号与普通高频信号没有本质上的区别,都必须遵守基本信号功率传输与端口匹配之间的关系 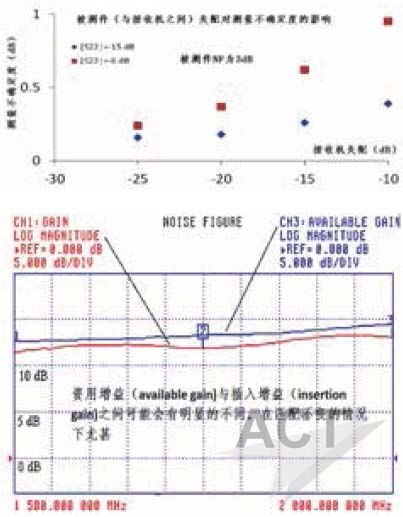 由于在被测件的输入端的失配对测量不确定度影响很大,尤其对增益较大的被测件,失配的影响不确定度基本上与被测件的成正比。由于,失配的实际影响是各端口之间反射的矢量叠加,因此,每次不同连接和每个器件状态的变化都会对测量造成影响。例如,Y参数法使用的噪声信号源的主体是由一个二极管构成,在二极管导通与关断状态下之间形成两个不同的噪声功率电平输出,可是,二极管的导通与关断时的阻抗分别近乎短路和开路,这是两个非常极端的阻抗变化,为了减小这两个状态下的阻抗差异,一般在噪声源内会使用很大的衰减器作为阻抗匹配之用。不同的 ENR表示衰减器的衰减量不同。  当然,对于噪声系数测量的失配分析并不仅仅包括信号功率的反射损失,另一可能的测量误差是由噪声源 (或被测件)的状态变化引起的被测件(或测量接收机)的噪声系数的变化,类似牵引效应。如下面方程所示,这里的 R表现为接收机对于被测件的输出阻抗变化而变化的相关性:
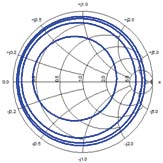
Rn = 等效噪声电阻(噪声系数与源阻抗的相关度) Fmin = 最小噪声系数 Γopt = 最小噪声系数状态下的源反射系数(复数) Γs = 源反射系数(复数) Zo = 特征阻抗(50 Ω) 为了得到在不同的阻抗环境下被测件的噪声系数特性,可以使用阻抗调谐器在不同的源阻抗(或负载阻抗)下测量噪声系数,在史密斯圆图上得到相应的在同一圆上的不同阻抗条件下噪声系数相同的等噪声系数圆。类似非线性器件的负载牵引测量。
改善测量不确定度:根据上面的分析,在噪声系数测量中要想改善测量的不确定度需要:选择线性度较高的测量接收机以减小在不同电平(测量状态和校准状态)下的测量误差;选择有适当增益的前置放大器以改善接收机本身的噪声系数;选择适合测量频率范围的滤波器以减小镜频干扰。 Y参数法测量不需要处理绝对功率测量精度问题,在缺乏线性测量大带宽和高动态范围信号手段的情况下有其精度优势。但是,由于 Y参数测量中对噪声源的校准相对困难以及噪声源在不同状态下的阻抗变化等因素影响,Y参数法测量法尚不能很好地适用于 50GHz以上的频率范围。而随着接收机技术的进步,大动态范围内信号电平的线性测量能力已经有了很大的提高。尤其对于毫米波频段内的噪声系数测量,增益法(冷源法)已经成为普遍认同的主要方法。
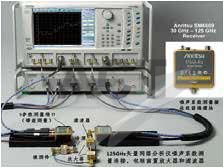
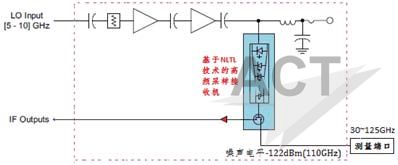
由于增益法需要测量被测件的增益 (S参数 ),矢量网络分析仪成为首选测量仪表。但是,矢量网络分析仪的接收机前端有定向耦合器(或电桥),增加了接收机本身的噪声系数和减小了测量线性动态范围,专用测量模块是一个可以提供的选择,前面提及的 Anritsu美国公司在 MS4640B矢量网络分析仪的基础上,增加噪声系数测量功能,频率覆盖范围 70kHz~125GHz,特别开发了基于高频采样技术的噪声接收前端模块,频率覆盖范围 30GHz~125GHz。由于采用高频采样技术,噪声接收前端模块的变频增益线性度基本上只受采样闪控脉冲的形状影响。为了提高闪控脉冲的陡峭度, MS4640B采用了非线性传输线( NLTL)技术来产生闪控脉冲,使接收机模块的线性动态范围得到提高。
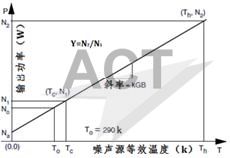
小结:本文以噪声级联方程为基础对于噪声系数测量的准确度的分析和计算给出了相应方程和方法。并且对噪声系数测量系统的参数选择和设定给出了相应的建议。 附件:常用噪声系数测量方法 ① Y参数法,测量噪声源处于“冷”状态和“热”状态下的被测件输出噪声功率比,即噪声信号源给出两个 X轴位置,测量接收机给出两个相应的 Y轴位置(附图 1),这样确定被测件噪声直线(假定被测件是线性的),进而推出Na,并得到被测件的噪声因子。因为 Y参数法不需要绝对功率测量(因为 Y参数为功率比值),避免了大带宽和大动态范围的功率测量瓶颈。
附图 1. Y参数法。
这里: Th为噪声源“热”状态等效噪声温度,即此时噪声信号源输出的功率密度为 Nh=kTh/Hz;同样 Tc代表噪声源在“冷”状态下的等效噪声温度(一般为室温); T0为标准噪声温度 T0=290k。 ENR=(Th-Tc)/T0;一般由噪声源供应商给出 Y=N2/N1为;以噪声信号源的“冷”“热”两个等效温度下激励下,被测件的输出噪声功率比,一般由接收机测得。 ②增益法(冷源法),如果已经知道被测件的增益,在被测件的输入端接上负载,如果知道环境温度,那么被测件的输入噪声功率为 kTcB。被测件输出为 N1。
附图 2. 增益法。
冷源法测量简单,但是需要测量被测件输出噪声功率的绝对值 N1。因此,需要对测量接收机进行绝对功率电平校准。■
版权声明: 《华体会体育推荐 》网站的一切内容及解释权皆归《华体会体育推荐 》杂志社版权所有, 未经书面同意不得转载,违者必究! 《华体会体育推荐 》杂志社。 |
|
|||||||||
 |
友情链接 |
| 首页 | 关于我们 | 联络我们 | 加入我们 | 服务条款 | 隐私声明 Copyright© 2025: ; All Rights Reserved. |
 |
 |